1Л13 / П-18М "Небо-СВ" - BOX SPRING 1Л13-3 "Небо-СВ" - BOX SPRING
Двухкоординатная РЛС дежурного режима метрового диапазона. Постановлением СМ СССР в начале 1975 г. была задана ОКР "Небо", целью которой была разработка двух унифицированных трехкоординатных РЛС метрового диапазона волн для войск ПВО в транспортабельном исполнении (РЛС ) и для Сухопутных войск в мобильном исполнении (1Л13 "Небо-СВ"). В том же 1975 г. вышло еще одно Постановление СМ СССР, в котором ОКР "Небо" была включена в перечень важнейших работ пятилетки. Разработка РЛС 1Л13 велась горьковским НИИРТ Минрадиопрома СССР (г.Горький, ныне - Нижний Новгород, ННИИРТ), главный конструктор - И.Г.Крылов. Серийное производство РЛС велось Горьковским телевизионным заводом (АО "Нител", г.Нижний Новгород). В 1986 г. станция была принята на вооружение войск ПВО СВ, Войск ПВО и ВВС, велось обучение строевых офицеров (ист. - Форум радиотехнических войск).
РЛС является мобильной когерентно-импульсной РЛС кругового обзора. РЛС предназначена для обнаружения, опознавания воздушных целей и выдачи их координат (дальности и азимута) на сопрягаемые с РЛС пункты обработки радиолокационной информации (пункты управления) радиолокационеных рот (постов) ПОРИ-П1 из состава радиотехнических бригад и батальонов и командных пунктов зенитных ракетных бригад войск ПВО Сухопутных Войск. Предполагалось также использовать эту станцию в ВВС и в Войсках ПВО страны. В состав комплекса РЛС 1Л13 входят:
- антенно-поворотное устройство на автомобильной платформе (базовый вариант - шасси "Урал");
- антенный пост на автомобильной платформе (базовый вариант - шасси "Урал");
- электростанция ЭД2хЗО-Т230П-ЗРА на автомобильной платформе (автомобиль КамАз);
- наземный радиолокационный запросчик на автомобильном прицепе АПУ.
Наименование П-18М соотносится с моделью РЛС 1Л13 и встречается в части источников.
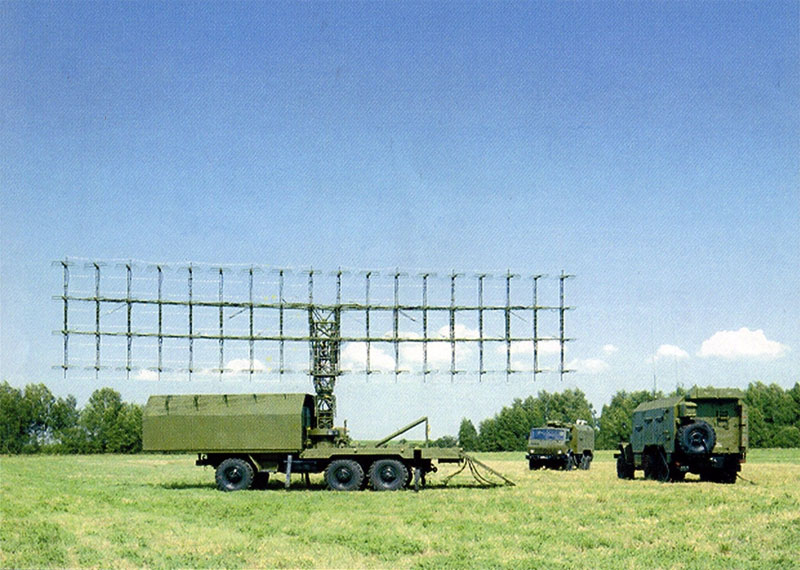
РЛС 1Л13-3 "Небо-СВ". Фото с пресс-тура в 202-ю зенитную ракетную бригаду Западного ВО, г.Наро-Фоминск, февраль 2012 г. (фото - Виталий Кузьмин, ).
РЛС 1Л13-3 "Небо-СВ" ( и ).
Обеспечивается высокая эффективность обнаружения любых воздушных объектов, включая малозаметные. Оборудование РЛС смонтировано на автомобилях высокой проходимости и прицепах. Автономное электропитание позволяет эксплуатировать РЛС в труднодоступных районах. Встроенная система непрерывного автоматического контроля и диагностики аппаратуры исключает необходимость в сложном контрольно-измерительном оборудовании.
Антенно-поворотное устройство РЛС 1Л13 в транспортном положении, 2006 г. (фото из архива Baton,).
Антенная система РЛС состояла из основной антенны, представлявшей собой плоскую эквидистантную решетку из 72 излучателей, и дополнительной трехэлементной решетки, установленной с обратной стороны основной антенны. В основной антенной решетке имелось шесть пассивно сформированных фрагментов, соединенных с антенными коммутаторами. Эхо-сигналы, принятые фрагментами решетки, через антенные коммутаторы поступали на широкополосные усилители высокой частоты, а затем на диаграммообразующую схему (ДОС), где соответствующим сложением сигналов шести фрагментов основной решетки формировался основной и два компенсационных канала для защиты РЛС от активных шумовых помех (АШП) по боковым лепесткам ДНА. Третий компенсационный канал для защиты от АШП со стороны задней полусферы формировался с помощью дополнительной (задней) антенны. Сигналы с выходов ДОС через токосъемник, систему усиления, преобразования частоты и устройство нормирования динамического диапазона помех поступали на трехканальный автокомпенсатор АШП и через компенсатор - на аппаратуру индикации помеховой обстановки. Заданная для станции зона обзора в угломестной плоскости обеспечивалась путем оперативного электромеханического наклона антенной решетки в вертикальной плоскости на фиксированные углы - 0, +9 и +13 град. Основной режим работы - наклон антенны под углом +9 град.
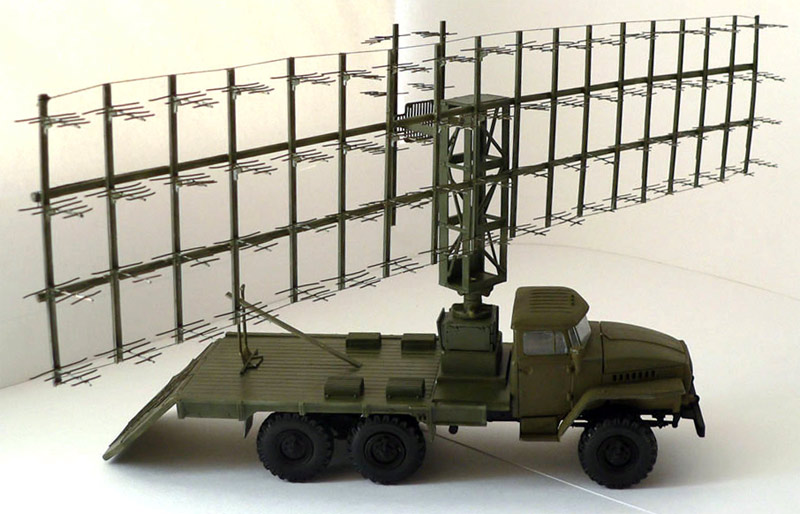
Основная антенна РЛС 1Л13 "Небо-СВ" на шасси "Урал". Без кожуха, модель. (автор модели - Евгений Малиновский aka Fly,).
Передающая система РЛС состояла из возбудителя, предварительного широкополосного усилителя (ПШУ), модулятора и мощного широкополосного усилителя (МШУ). В возбудителе производилось преобразование эталонного сигнала фиксированной длительности, манипулированного кодом Баркера, с промежуточной частоты на одну из рабочих частот РЛС. Выходной сигнал возбудителя усиливался в ПШУ, а затем в МШУ. МШУ был выполнен на широкополосном эндотроне. В РЛС было установлено два эндотрона - основной и резервный. Время переключения с основного эндотрона на резервный - 8 мин. Было возможно экстренно осуществить переключение за 3 мин.
С выхода автокомпенсатора АШП сигналы в аналоговом виде поступали на два (синфазный и квадратурный) фазовых детектора и два аналого-цифровых преобразователя (АЦП). Преобразованные в цифровую форму сигналы поступали в аппаратуру СДЦ и далее в аппаратуру оптимальной фильтрации, где обеспечивалось сжатие полезного сигнала до длительности одного кванта (3,3 мкс), и затем в некогеретный накопитель. Аппаратура СДЦ была выполнена на базе цифрового режекторного фильтра с устройством автокомпенсации доплеровского сдвига частоты пассивной помехи на входе фильтра. На выходе фильтра по данным схемы межобзорного картографирования помех осуществлялась автоматическая стабилизация уровня ложных тревог. С некогерентного накопителя сигналы поступали в систему автосъема информации, а через АЦП ~ на индикатор кругового обзора (ИКО). В состав системы автосъема входили устройство первичной обработки сигналов, спецвычислитель, устройство стробирования, аппаратура сопряжения с потребителями РЛИ и телекодового обмена цифровой информацией между РЛС и этими потребителями (ПОРИ-П1 и др.). Эта система осуществляла измерение и кодирование координат целей с учетом их высоты (угла места), получаемой от сопряженного со станцией радиовысотомера (ПРВ-13, ПРВ-16, ПРВ-17) и выдавала их потребителям и на ИКО, два из которых были выносными. В РЛС 1Л13 были реализованы следующие виды съема информации: визуальный - по координатной сетке ИКО, ручной - с использованием маркера, полуавтоматический - с замещением координат маркера на ближайшую контрольную точку автомата и автоматический.
Имитатор станции позволял производить тренировки расчета РЛС, формируя сигналы до 20 своих и чужих целей, сигналы опознавания и различные виды помех. Аппаратура опознавания состоит из серийно выпускаемого наземного радиолокационного запросчика с антенно-поворотным устройством на прицепе АПУ также от серийного запросчика.
В отличие от других станций своего поколения РЛС использует цифровую обработку сигналов. Станция оборудована бортовым компьютером, который одновременно обрабатывает до 256 воздушных целей (1Л13-3), выдает информацию на все радарные дисплеи и передает данные в цифровом виде центрам противовоздушной обороны.
При воздействии на станцию активных шумовых, пассивных и комбинированных помех заданных уровней дальность действия РЛС по цели на высоте 10000 м не снижалась более чем до 200 км. В станции обеспечивалась поимпульсная перестройка рабочей частоты при воздействии прицельных помех.
Модель одного из вариантов комплектации РЛС 1Л13 "Небо-СВ" в музее ОАО "Нител" ().
Состав РЛС (более подробно):
1) антенно-поворотное устройство на автомобильной платформе (базовый вариант - шасси "Урал");
Антенно-поворотное устройство РЛС 1Л13-3 "Небо-СВ" ().
2) антенный пост на автомобильной платформе (базовый вариант - шасси "Урал", кабина АП) - в АП размещена приемо-передающая аппаратура, аппаратура защиты от помех, индикаторная аппаратура, аппаратура автосъема и передачи радиолокационной информации (РЛИ), имитации, связи и документирования, сопряжения с потребителями РЛИ, функционального контроля и непрерывной диагностики, аппаратура наземного радиолокационного запросчика (НРЗ, кроме антенно-поворотного устройства), источники вторичного питания и аппаратура жизнеобеспечения;
Антенный пост - кабина управления на шасси "Урал". Фото с пресс-тура в 202-ю зенитную ракетную бригаду Западного ВО, г.Наро-Фоминск, февраль 2012 г. (фото - Виталий Кузьмин, ).
3) электростанция дизельная ЭД2хЗО-Т230П-ЗРА на автомобильной платформе (автомобиль КамАз-43114);
Передвижная электростанция на шасси КамАЗ-43114 снаружи и внутри. Фото с пресс-тура в 202-ю зенитную ракетную бригаду Западного ВО, г.Наро-Фоминск, февраль 2012 г. (фото - Виталий Кузьмин, ).
4) антенный пост наземного радиолокационного запросчика на автомобильном прицепе типа 2-ПН-4М.
РЛС могла доукомплектовываться двумя выносными индикаторами кругового обзора и кабелями сопряжения с потребителями РЛИ. Радар может дополнительно оборудоваться двумя выносными рабочими местами операторов, что позволяет управлять его работой и следить за воздушной обстановкой на расстоянии до 500 м от радара. Это обеспечивает высокую выживаемость радара и позволяет увеличить число воздушных объектов, взятых на сопровождение.
Комплекс средств РЛС 1Л13-3 "Небо" на одной из выставок военной техники в Нижнем Новгороде. На нижнем фото - наземный радиолокационный запросчик в боевом положении ( и ).
Прицеп АПУ с наземным радиолокационным запросчиком. На заднем плане слева - машина с кабиной управления антенного поста. Фото с пресс-тура в 202-ю зенитную ракетную бригаду Западного ВО, г.Наро-Фоминск, февраль 2012 г. (фото - Виталий Кузьмин, ).
ТТХ РЛС 1Л13:
Обслуживающий персонал - 6 чел (расчет)
Количество транспортных единиц - 3 автомобиля типа "Урал" и прицеп типа 2-ПН-4М с антенно-мачтовым устройством радиовысотомера. РЛС 1Л13-3 - 2 автомобиля "Урал", 1 автомобиль КамАз с кунгом, прицеп типа 2-ПН-4М с высотомером.
Время развертывания РЛС - 40 мин
Время включения РЛС при работающей электростанции - 3 мин
Потребляемая мощность - 30 кВт
Импульсная мощность - 120 кВт
Чувствительность приемника - 103 дБ/Вт
Ширина ДНА по азимуту - 6 град.
Зона обзора по цели типа "истребитель" в беспомеховой обстановке с вероятностью 0.8:
режим "Основной луч" (угол наклона антенны 9 град.)
режим "Нижний луч" (угол наклона антенны 0 град.)
режим "Верхний луч" (угол наклона антенны 13 град.)
по дальности:
высота 100 м - 22,5-27,5 км
высота 500 м - 45-57 км
высота 10000 м - 236-273 км
высота 27000 м - 335-425 км
по дальности:
высота 100 м - 29 км
высота 10000 м - 278 км
по азимуту - 360 град
по азимуту - 360 град
по азимуту - 360 град
по углу места - до 25-29 град
по углу места - до 30 град
по высоте - до 23-42.5 км
Разрешающая способность на расстоянии более 50 км:
- по дальности - не более 1000 м
- по азимуту - не более 6 град
Коэффициент подпомеховой видимости на фоне отражений от местности - не менее 50 дБ
Среднеквадратичные ошибки определения координат:
- по дальности - не более 600 м
- по азимуту - не более 6 град
Период кругового обзора РЛС - 10 с / 20 с (два режима)
Количество одновременно отображаемых целей:
- не менее 50 (РЛС 1Л13)
- до 256 (РЛС 1Л13-3 с цифровой обработкой данных)
Модификации:
1Л13 "Небо" - базовый вариант РЛС.
1Л13-3 / 1Л13-3-1 "Небо" - модификация более позднего выпуска с цифровой обработкой данных РЛС.
Антенна РЛС 1Л13-3 "Небо-СВ" на шасси автомобиля "Урал" ().
Комплекс РЛС 1Л13-3 "Небо-СВ" ().
Статус: СССР / Россия
- 1986 г. - к концу года промышленностью произведено как минимум 4 РЛС 1Л13.
Экспорт:
Украина:
- 2008 г. РЛС 1Л13 или её модификации состоят на вооружении. Работы по модернизации РЛС ведутся НПО "Искра" (Запорожье).
Источники:
Зачепицкий А. Путь к трем координатам. // Воздушно-Космическая Оборона. Сайт , 2010 г.
Радиолокация. Сайт , 2012 г.
Форум выпускников ВРТУ-ВВКУРЭ ПВО. Сайт , 2011 г.
Форум радиотехнических войск ПВО ГСВГ. Сайт , 2008 г.
Radar detection stations & complexes. Сайт , 2012 г.
 01.05.2013, 17:54
#1
01.05.2013, 17:54
#1






















 Линейный вид
Линейный вид

 Похожие темы
Похожие темы